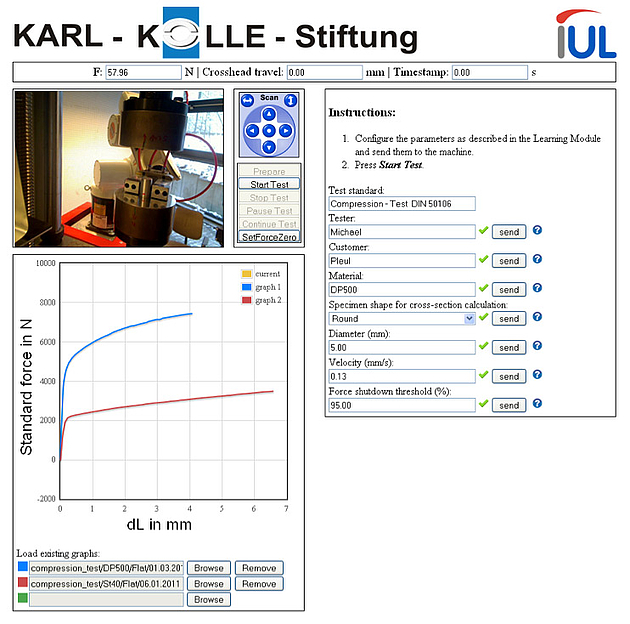
Im Projekt erfolgte die Entwicklung eines ferngesteuerten Stauchversuchs zur Materialcharakterisierung. Dazu erfolgte im ersten Abschnitt die Entwicklung zum Parameteraustausch zwischen Universalprüfmaschine und Nutzer sowie die Einbindung eines 6-Achsen-Roboters-Greifsystem. Anschließend wurden die Entwicklung und der Ausbau der Benutzerschnittstelle zur interaktiven Konfiguration des Experimentes durchgeführt. Abschließend erfolgte die Integration von grundlegenden E-Learning-Inhalten und die Konzeption und Entwicklung des Probenmagazins sowie dessen Fertigung und Einbindung in die Gesamtumgebung.
Die Resultate stellen eine unabdingbare Grundlage für die weitere Forschungs- und Entwicklungsarbeit auf dem Gebiet der teleoperativen Nutzung von Experimentiereinrichtungen dar, sowohl auf dem Gebiet der ingenieurwissenschaftlichen Laborausbildung wie auch bei der effizienten Nutzung von Ressourcen in der Forschung. Die Ergebnisse werden daher in den Projekten ELLI und IngLab weiter verwandt.